Lecture 16: Reinforcement Learning from Verifiable Rewards¶
约 4044 个字 6 行代码 4 张图片 预计阅读时间 14 分钟
Outline
这一讲先回顾 DPO 及其变体,讨论 RLHF 的常见陷阱(过度优化与模式崩塌),然后转向 RLVR 范式,从 PPO 到 GRPO 的演进,最后通过 DeepSeek R1、Kimi k1.5 和 Qwen 3 三个案例研究展示工业级 RL 训练的实际流程与工程细节。
Review: DPO with Its Variants¶
我们提到说,DPO 的设计初衷是简化 PPO,去掉 Reward Model 和 on-policy rollout,直接在成对数据上做监督学习,对于好的回复做正向梯度,对坏的回复做负向梯度。上一节介绍了 DPO 的损失函数为:
这中间的推导环节大概是:使用非参数估计的知识,在闭式解的形势下将 \(\pi_\theta\) 和 \(r\) 联系起来,通过策略参数化奖励,然后代入 Bradley–Terry 偏好模型的损失函数中,得到 DPO 的损失函数。其策略梯度如下:
DPO 一度主导开源模型后训练,Chris Manning 展示的排行榜上早期顶级开源 RLHF 模型几乎全用 DPO。
DPO 之后涌现大量 *PO 变体,两个被广泛使用:
- SimPO(无参考策略):(1) 去掉 \(\pi_{\mathrm{ref}}\);(2) 按回答长度归一化更新步长。
- Length-normalized DPO:保留参考策略但按长度归一化。
这两个算法在 AI2 TULU3 中被广泛尝试。但是值得注意的是:RL 结论高度依赖实验设置(比如环境设置、基模的选择)。AI2 早期发现 PPO > DPO;但 TULU3 发现好的 SFT 会吃掉 PPO/DPO 的增益,唯一有优势的反而是 Length-normalized DPO。不要将单篇 RL 论文的结论奉为绝对真理,要小心阅读过多的笼统结论。
1. Pitfalls of RLHF¶
过度优化 / Over-optimization:
- 本质上是 RL 领域的过拟合:随着对测录的的优化加深,Proxy Reward 得分上升,但与真实人类偏好偏离,性能呈倒 U 型下降(Reward Hacking)。
- 在 Expert Iteration、Best-of-\(n\)、PPO 中均被验证。
- 但用无噪声的 LM 偏好(如 single-prompt GPT-4 评分)时过度优化消失,说明根源在于奖励信号的噪声。
模式崩塌 / Mode Collapse:
- 预训练/SFT 是概率建模(分布匹配),RLHF 是优化 Policy,底层不再有客观数据分布。
- 多篇论文(Anthropic、GPT-4、学界)显示 RLHF 后模型校准性大幅下降、过度自信,输出熵显著降低。
2. From RLHF to RLVR¶
人类反馈难以大规模优化。那参考一下 RL 在围棋/AlphaGo、蛋白质折叠/AlphaFold 中的成功经验:在奖励真实且可被快速验证的领域,RL 能够全面释放其潜力。能不能在语言模型中也找到这样的领域?答案是几乎可以的。使用预训练、SFT 以及 RLHF 可以将模型提升到 GPT-3.5 级别的水准,而 RLVR/Reinforcement Learning from Verifiable Rewards 则是通往 o1/R1 级别的必经之路。
2.1 From PPO to GRPO¶
理解 GRPO 前必须先理解 PPO。从最简单的策略梯度一步步到 PPO:
- 使用策略梯度方法对策略进行直接优化;
- 使用优势函数和 TRPO 来降低方差并允许多次更新同一批数据;
- PPO 用裁剪策略比值代替 TRPO 的 KL 约束,新策略偏离旧策略太远时,梯度被截断在 \(1 \pm \epsilon\),自然限制更新步幅。
最后得到的损失函数是:
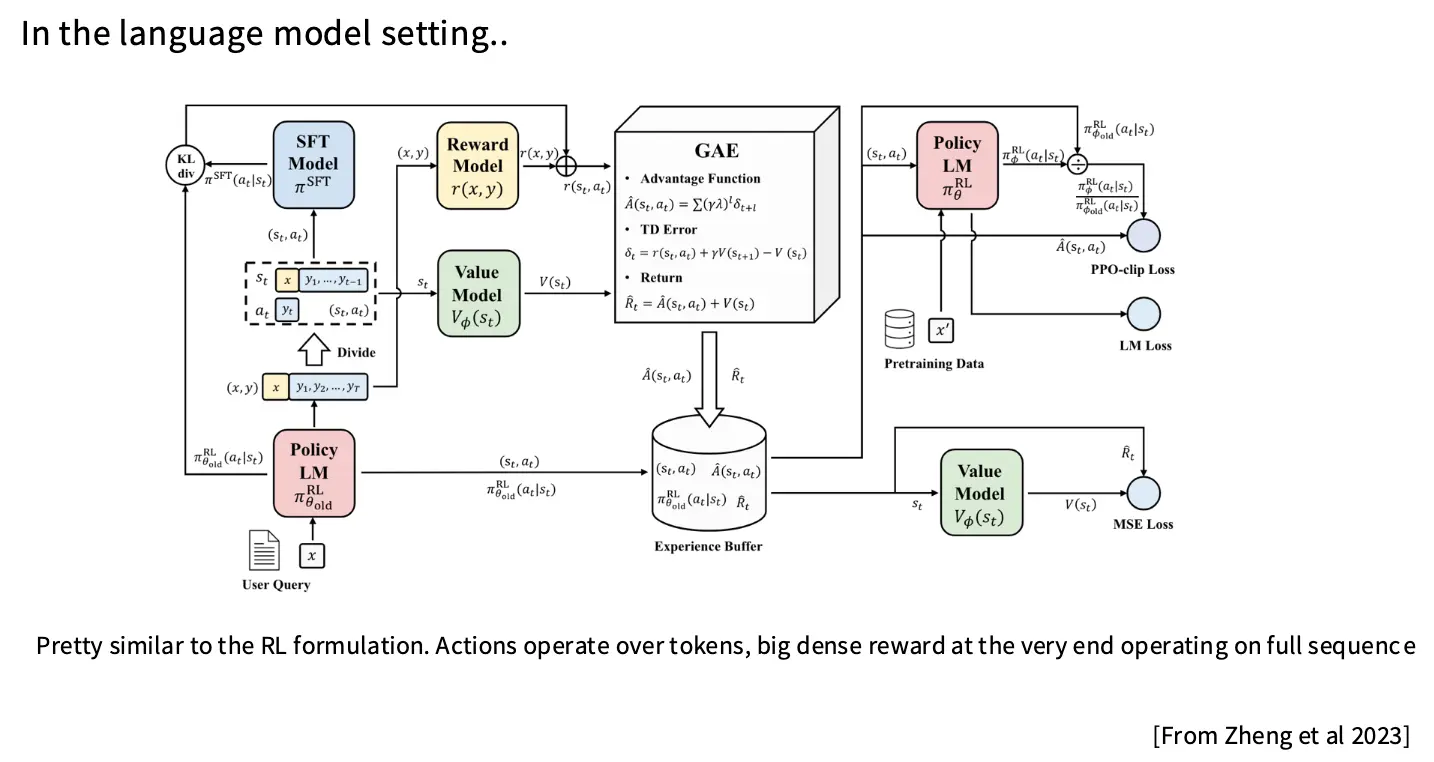
对于传统的面向控制和游戏的领域,ICLR 的博客列出了 PPO 的 37 个实现细节,下面这张图简单概述了 Language Model RL 中 PPO 的训练流程:
以 AlpacaFarm PPO 实现为例,关键工程细节:
-
奖励重塑/Reward Shaping:LM RL 更像 Contextual Bandit 而非多步 MDP。序列末尾给 terminal reward,将 reward model 输出的整句的奖励放到最后一个有效 token 上。并且对每个 token 给逐 token 的 KL 惩罚,防止偏离参考模型太远。实践中对 KL 散度做 clamp,当散度是负的时候,这时候不因为模型更不自信而给予奖励,帮助训练稳定性。
-
广义优势估计/GAE:主要是为了降低方差,并且改善由于 reward model 给出的奖励集中在最后一个 token 上导致的稀疏奖励问题,改善 token-level 的 credit assignment 问题。
\[ \hat{A}_t^{\mathrm{GAE}(\gamma, \lambda)} := \sum_{l=0}^{\infty} (\gamma \lambda)^l \delta_{t+l}^V \quad \text{where} \quad \delta_t^V = r_t + \gamma V(s_{t+1}) - V(s_t) \]PPO 用优势估计而非绝对奖励。由于 LM RL 本质是 bandit 问题,\(\gamma = \lambda = 1\) 时 GAE 退化为 reward-to-go 减 value。
2.2 GRPO¶
GRPO/Group Relative Policy Optimization 以及新算法的提出主要是为了解决 PPO 和 DPO 的一些实际问题:
- PPO:实现复杂,价值模型占大量显存,甚至和原来的 Policy 一样大,也需要额外调参。
- DPO:数据不天然成对(数学题看正误而非偏好),且是离线算法。
GRPO 保留 PPO 的裁剪框架,砍掉 GAE 和 Reward Model,代之以组内 Z-Score。
给定输入问题,让策略模型生成 \(G\) 个回答(一个 Group)。对第 \(i\) 个回答的优势估计:
使用可以可以验证的分数 \(A_i\) 代替 PPO 中通过训练出来的 Reward Model 计算的优势估计,这就是 RLVR 名字的来源。GRPO 的完整目标函数如下:
这里面 KL 散度不是经典的实现,而是修改成了下面的形式为了降低方差:
对于在线训练,GRPO 退化为极简策略梯度:比同组更好的加权,低于平均的降权。GRPO 的实现非常精简,这有很大程度上归功于不需要价值函数。可以参考 McGill-NLP/nano-aha-moment 的实现。大概流程是:对每一个 rollout 计算奖励,计算每个组的均值和标准差,计算 KL 散度,最后计算 GRPO 的损失并更新。
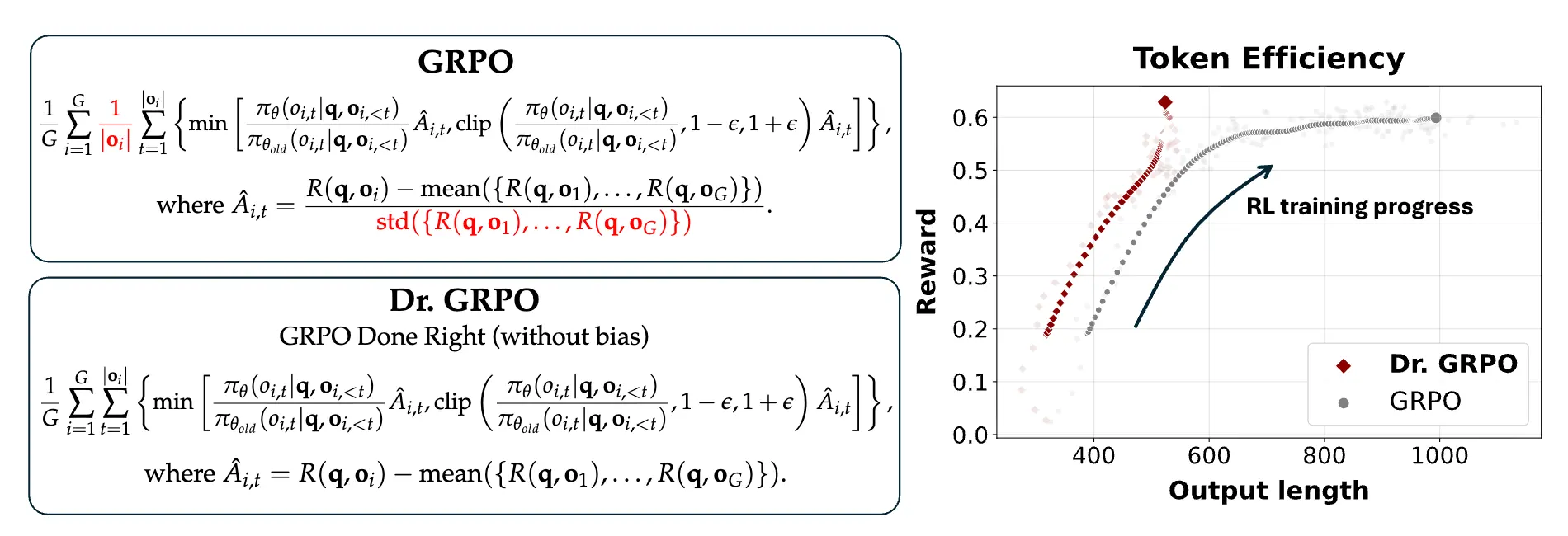
至于为什么 GRPO 可以 work,不同题目难度不同。同组平均奖励是题目难度的天然 baseline,减去它就能剔除难度影响,实现方差缩减。但是 Dr. GRPO 指出 GRPO 的两个数学缺陷:
缺陷一:除以标准差破坏基线无偏性:
策略梯度定理中可以减去任何与动作无关的基线 \(b(s)\),无偏性来源于 \(\sum_a b(s) \nabla \pi(a \mid s, \theta) = b(s) \nabla 1 = 0\)。减均值保持无偏,但除以标准差是非线性操作,破坏无偏性。在实践中,题目太简单或太难时标准差极小,除以它给过易/过难题赋予极高梯度权重,阻碍学习中等难度题。Dr. GRPO 通过直接减去组内奖励的均值来修正这个问题:
缺陷二:长度归一化的恶意动机:
GRPO 早期实现将奖励除以回答长度,导致:
- 模型预测自己无法答对(负奖励)时,疯狂增加废话长度来稀释惩罚;
- 正确回答则尽量极短。
去掉长度归一化后性能相同甚至更好,回答长度自然趋于稳定。这表明推理模型中的极长 CoT 有一部分可能只是算法奖励偏置的副产物,比如原来的 GRPO 可能在无意中激励了模型生成冗长的 CoT 来规避惩罚。
3. Case Studies¶
3.1 DeepSeek R1¶
DeepSeek R1 证明简单的 Outcome-based Rewards + GRPO 足以追平 o1。不需要 MCTS,不需要 PRM。
R1-Zero:
- 奖励:准确率(对错)+ 格式(
<think>标签); - 基模:DeepSeek-V3(未经 SFT),直接 RL;
- 结果:只是比 o1 略差一些;
- 现象:训练过程中 CoT 长度持续增长,出现 "aha moment" 式的回溯/自我反思。但争议认为 CoT 长度变长是为了弥补回答不出问题引起的负面奖励,aha moment 可能是基座预训练数据中已有的特性被诱导出来。
R1:基座模型 DeepSeek-V3 \(\rightarrow\) Reasoning SFT \(\rightarrow\) RL(GRPO) \(\rightarrow\) General SFT/RLHF。和 R1-Zero 相比,R1 增加了 Reasoning SFT 的训练,对 CoT 也增加了一致性的奖励,也加了一些 Non-verifiable 奖励。
- Reasoning SFT:直接进行 RL 训练生层的 CoT 数据质量不高,并且冷启动时期训练也不稳定。所以使用少量高质量的 CoT 数据对模型进行微调,这些数据的来源包括:few-shot prompting、直接提示模型,产生带反思的详细答案,以及别的数据。这步提升了模型回答的可解释性。即使一小部分高质量的 CoT 数据也能显著提升从从基模开始训练的稳定性和最终性能。
- 推理 RL:和 R1-Zero 基本相同,但是增加了语言一致性奖励/Language Consistency Reward,计算 CoT 中目标语言词汇比例。监管这样的对齐导致模型性能的略微下降,但提升了可读性,和人类偏好对齐。
- 通用 SFT:一般跑两轮。推理数据(比如写一个证明)用不可验证任务,DeepSeek V3 做裁判,非推理数据用 DeepSeek V3 的 SFT 数据集增强。
- RLHF:可验证任务复用 R1-zero 的 RLVR,不可验证任务用 DeepSeek V3 RLHF pipeline,但是这部分使用 GRPO 而不是 DPO 之类的。
蒸馏:DeepSeek R1 生成八十万条 CoT traces,SFT 蒸馏到 Qwen 2.5 系列。效果非常棒。
失败尝试:
- PRM/Process Reward Model:细粒度步骤难定义,中间推理步骤是否正确也很难确定,也很容易被 Reward Hacking。
- MCTS:很难 Scale up。
3.2 Kimi k1.5¶
与 R1 同期,路径略不同,数据把控更精细。
数据清洗:
- 标准的数据收集:覆盖 STEM、竞赛、通用推理,按领域学科分类确保均衡,甚至不止覆盖了纯文本推理,还有图片文本问答。
- 剔除选择题和判断题:这是为了防止假阳性。
- Best-of-N 难度筛选:基座模型高温采样 10 次,按 pass rate 衡量难度,过滤简单题。
RL 算法
采用基于参考的奖励模型:
中间可以知道:
进而得出 Baselined Policy Gradient with KL Regularization 的更新公式:
这就很像是 GRPO 了,说明正确运用基线和正则化后,不同 RL 算法殊途同归。
长度控制:为了避免出现和原 GRPO 一样的长度奖励偏置,Kimi 设计了一个基于长度的奖励:
\(\lambda \in [-0.5, 0.5]\),较长序列 \(\lambda\) 更负。效果为:答对鼓励短 CoT,答错鼓励长度贴近且比同批次平均更短)。此机制在训练后期才启用。
其他:这里更重要的是 Kimi 的刘你问提到了 RL Infra 的细节与要求
- 课程学习:标注难度从易到难,按 \((1 - \text{success\_rate})\) 采样避免重复已解决的题。
- 奖励设计:代码题用 ground truth 生成新测试用例;数学题用 800k 样本训练一个 CoT Reward Model 用于做等价性判断。
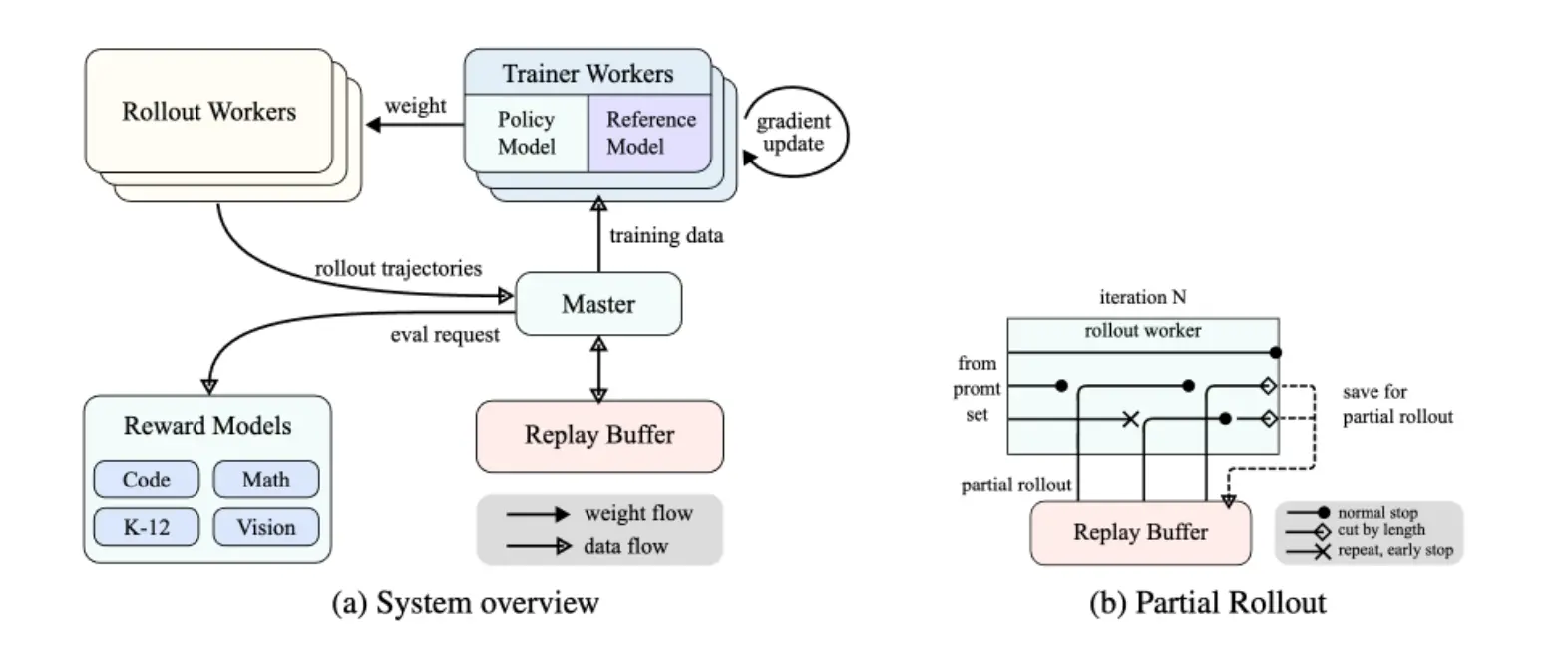
- RL Infra:
- RL 训练阶段比正常的训练阶段更难将 GPU 完全利用起来,一方面是因为 rollout 其实就是 inference 的过程,这部分本来就是比较慢的;另一方面是必须在 rollout 和训练之间频繁的切换,inference 阶段必须将输出轨迹传回训练节点,训练节点又要将新的权重传回推理节点,通信开销也是巨大的。另一方面,长的 CoT 也会导致 batch 内样本的长度差异很大,导致 GPU 利用率不高。
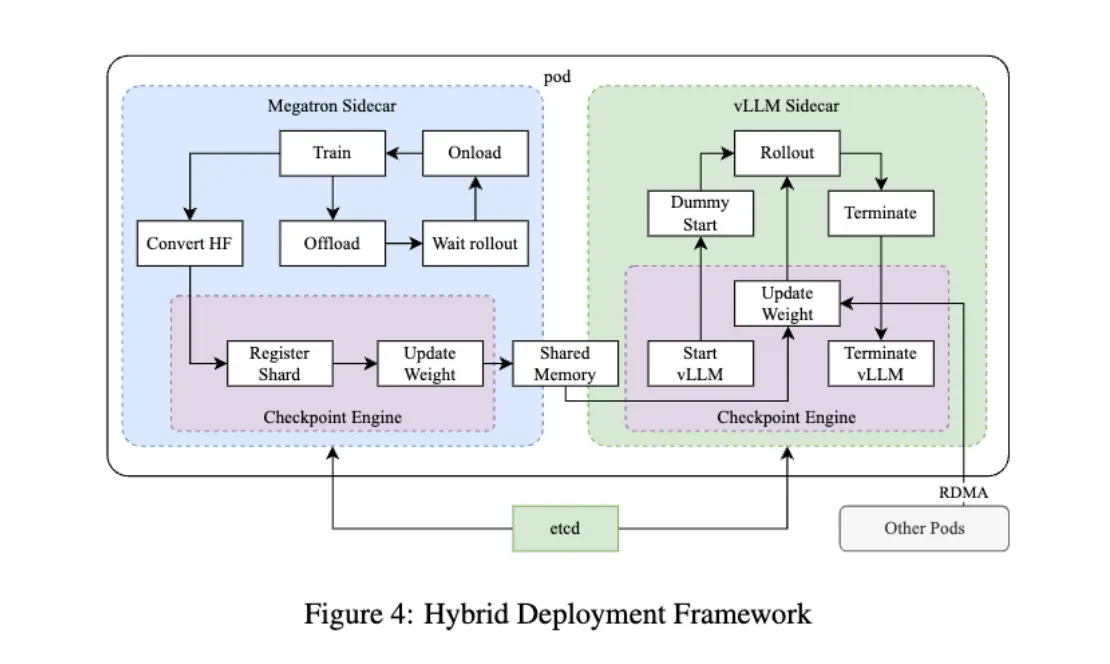
- RL 训练节点与推理框架(vLLM)分离。Training Phase 完成后 Megatron offload GPU 到共享内存,vLLM 加载权重做 rollout,完成后释放回 Megatron。通过 NCCL/RDMA 通信权重。
3.3 Qwen 3¶
Pipeline:和前面的基本相同,从基模开始,先做 Long-CoT 的冷启动,接着是 Reasoning RL,Thinking Mode Fusion,最后是 General RL,得到旗舰模型。然后再使用 Strong-to-Weak Distillation 将旗舰模型蒸馏到轻量级模型。
SFT + Reasoning RL:和前面类似,先用少量高质量的 CoT 数据微调模型,提升模型的推理能力和训练稳定性。这部分的数据筛选包括:使用 best-of-n 筛选难题,移除不实用 CoT 就可以得到正确答案的题目,移除和验证集过于相似的题目,以及进行人工筛选。Qwen 的 Reasoning RL 阶段和 R1 类似,使用 GRPO 进行训练,但是甚至只是用了 3995 条数据就达到了不错的效果。
Thinking Mode Fusion
训练好思考模型后,构造带 /think 和 /no_think 标签的数据微调。Thinking Mode 下模型在 <think>...</think> 中输出完整推理;Non-Thinking Mode 下 <think></think> 为空,直接给答案。
模型在同一参数集合里无缝切换 System 1/快思考和 System 2/慢思考。
动态截断思考:推理时插入特殊字符串(如 "Considering the limited time by the user, I have to give the solution based on the thinking directly now.\n.\n\n"),模型中止思考并直接作答。这不是显式训练的能力,而是 Thinking Mode Fusion 的自然涌现。
Thinking budget 从 1K → 32K tokens,AIME'24/25、LiveCodeBench、GPQA Diamond 的 pass@1 持续提升,始终高于 Non-Thinking 基线。
RL 的 Trade-off
各阶段消融实验:
- Stage 2/Reasoning RL:大幅提升数学/代码推理
- Stage 3/Thinking Mode Fusion:灵活思考/不思考切换
- Stage 4/General RL:提升通用任务能力(ArenaHard、Agent、IF),但是在思考模式下,损害了数学/STEM/代码能力,反而在非思考模式下提升了这些能力。
这意味着通才 vs 专才的权衡、思考与非思考的权衡在后训练中不可避免。