Chapter 6: Temporal-Difference Learning¶
约 768 个字 2 张图片 预计阅读时间 3 分钟
6.1 TD Prediction¶
6.2 Advantages of TD Prediction¶
6.3 Optimality of TD(0)¶
6.4 Sarsa: On-Policy TD Control¶
第一步需要学习的是动作价值函数,我们必须对所有状态 \(s\) 和动作 \(a\) 估计出在当前行动策略下所有对应的 \(q_\pi(s, a)\),Sarsa 使用更新公式
更新动作价值函数,每当从非终止状态的 \(S_t\) 中出现一次转移之后,就进行上面的一次更新,如果 \(S_{t+1}\) 是终止状态,则 \(Q(S_{t+1}, A_{t+1})\) 的值为 0。这样的更新规则使用了描述整个事件的五元组 \((S_t, A_t, R_{t+1}, S_{t+1}, A_{t+1})\),因此被称为 Sarsa。
基于上述的 Sarsa 预测方法设计一个同轨策略的控制方法是直接的,首先持续为行动策略 \(\pi\) 估计其动作价值函数 \(q_\pi\),然后根据估计的 \(q_\pi\) 朝着贪心优化的方向转化 \(\pi\)。下面是具体算法伪代码:
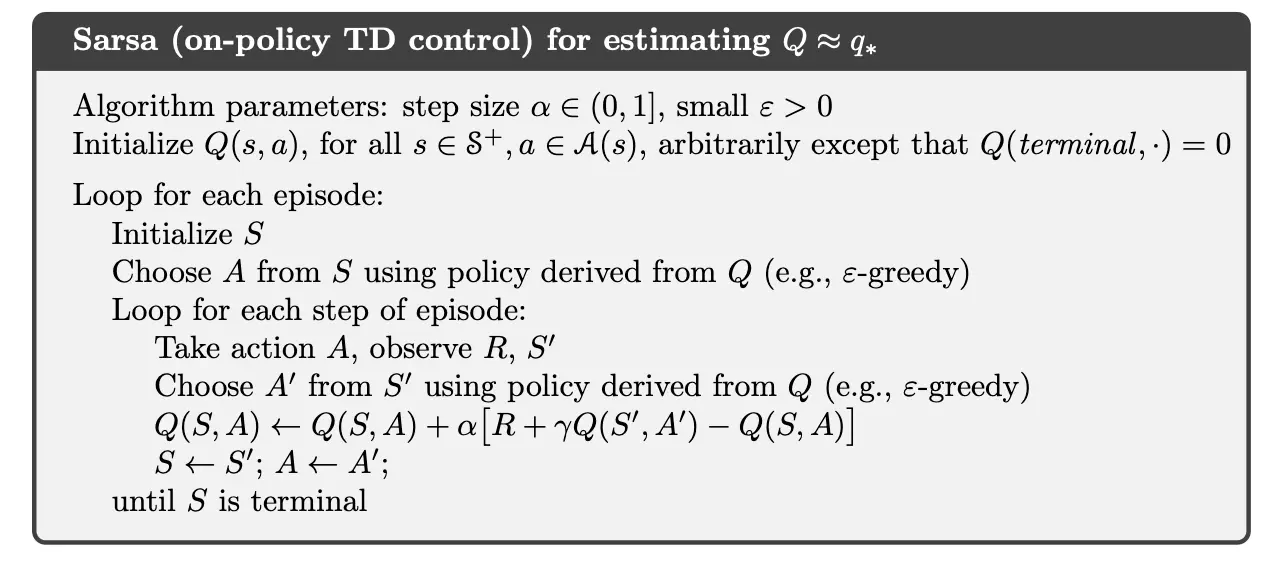
只要所有状态-动作二元组都被访问过无限次,并且贪心策略在极限情况下可以收敛,那么 Sarsa 可以以概率 1 收敛到最优的策略和动作价值函数。
记状态-动作二元组的 TD 误差为 \(\delta_t = R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t)\),这里可以估计出
其中 \(T\) 是事件的终止时间。计算很简单。
6.5 Q-Learning: Off-Policy TD Control¶
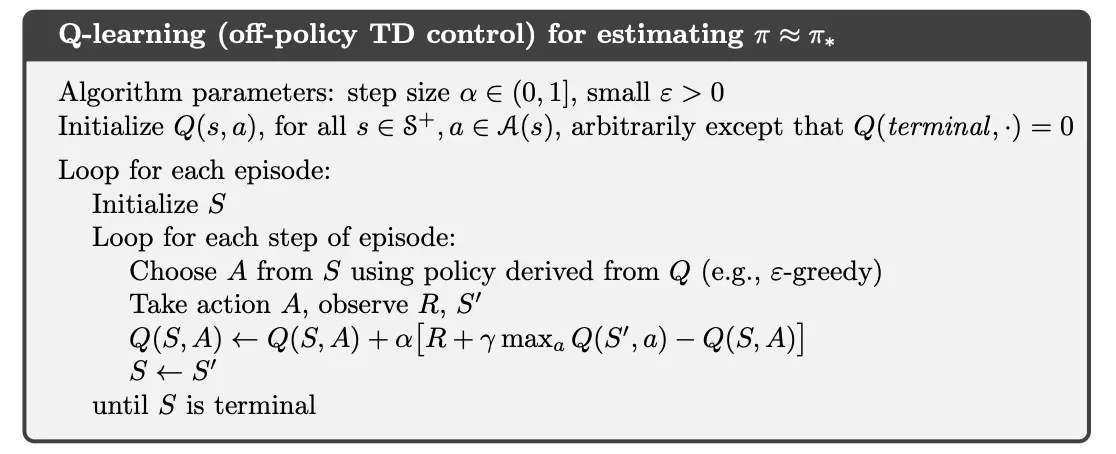
Q-Learning 被定义为
其中,待学习的动作价值函数 \(Q\) 采用了对最优动作价值函数 \(q_*\) 的直接近似作为学习目标,而与用于生成智能体决策序列轨迹的行动策略是什么无关(对比 Sarsa,其使用待学习的动作价值函数本身,其计算需要知道下一时刻的动作)。这极大简化了算法的分析。
尽管 Q-Learning 是离轨策略方法,但是正在遵循的行动策略仍然会产生影响,因为其可以决定是哪些状态-动作二元组会被访问和更新,并且只要所有状态-动作二元组都被持续更新,整个学习过程就会正确收敛。在第五章提到的一般情况下,\(Q\) 可以以概率 1 收敛到 \(q_*\)。Q-Learning 算法的流程如下框中所示。
这里对书后两道题目进行解答:
为什么 Q 学习被认为是一种离轨策略方法?
假设使用贪心的方式选择动作,那么此时 Q 学习和 Sarsa 是完全相同的算法吗?它们会做出完全相同的动作选择,进行完全相同的权重更新吗?